Robot Arm
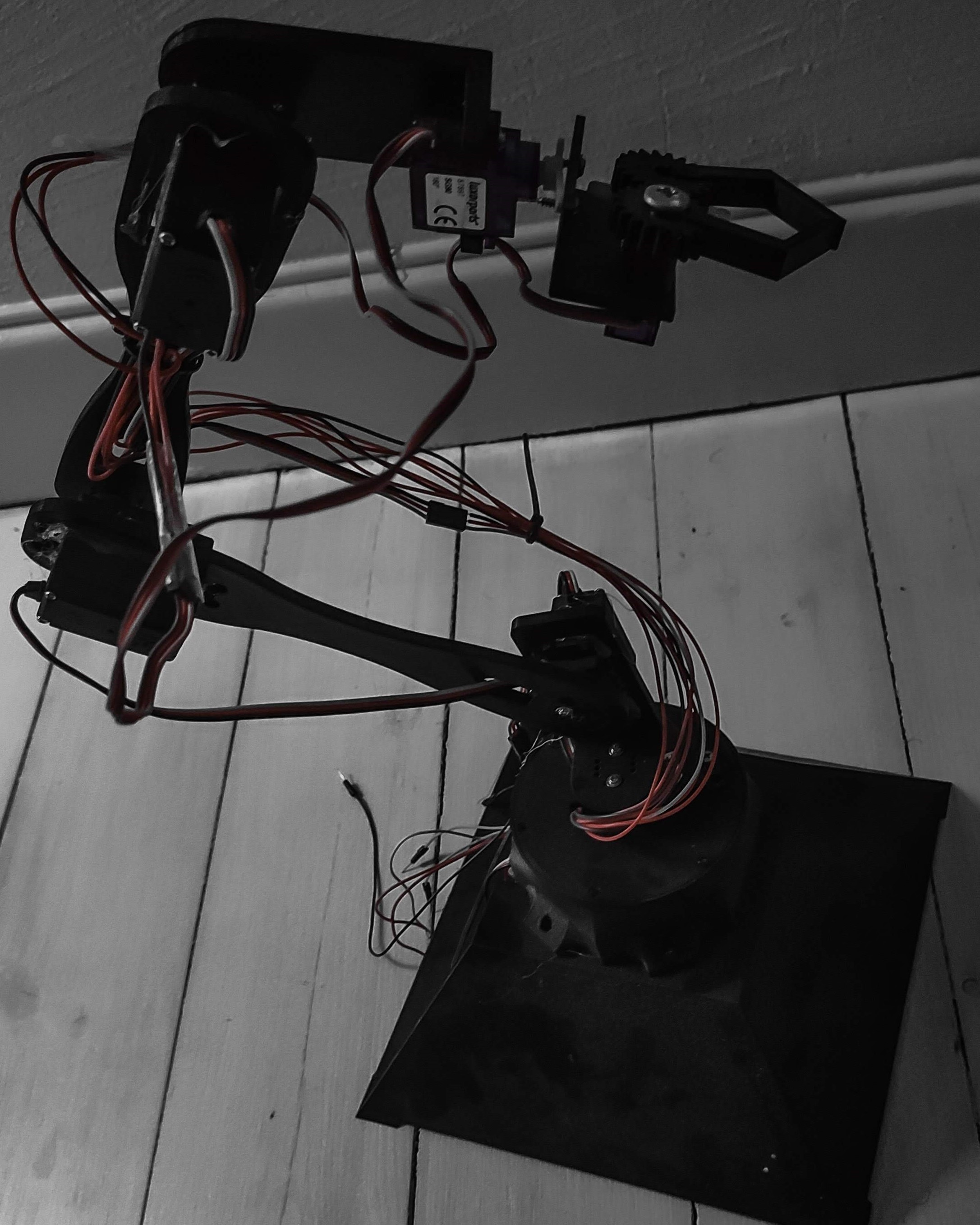
The robot arm was built by me to learn more about ROS and 3D printing. The robot itself might not be all that spectacular, and the design is prone to oscillations. Nonetheless, it served as a good project for expanding my knowledge and taught me invaluable lessons. All the CAD models can be found on my GitHub. The robot could be teleoperated with a keyboard and the communication was handled with ROS. A computer would take the user inputs from a keyboard and route them over a LAN network to a Raspberry Pi which would then send the commands using rosserial_arduino to an Arduino microcontroller which would control the servo motors. Sadly, all the related code is lost.
/gripper_CAD.PNG)
/arm.PNG)